Kaartweergave Modussen uitgelegd voor Humminbird systemen
26 februari 2026 Bart van den Boom
Korte samenvatting
In dit artikel laat ik zien hoe kaartoriëntatie werkt op Humminbird systemen en wat de verschillende weergaven betekenen. De instellingen bepalen hoe de kaart zich gedraagt ten opzichte van je bootpositie en beweging. North Up houdt de kaart statisch met het noorden bovenaan, COG Up draait op basis van werkelijke GPS-beweging, Course Up volgt een berekende navigatiekoers richting een doel, en Head Up draait mee met de fysieke richting van de boot via een kompassignaal. Vooral in combinatie met Minn Kota en GPS-sturing is de juiste keuze belangrijk voor overzicht, stabiliteit en intuïtieve navigatie op het water.
Moderne navigatiesystemen
Moderne navigatie- en vissystemen combineren GPS-technologie, sensortechniek en automatische motorsturing. In een configuratie met een Humminbird kaartplotter en een Minn Kota trolling motor worden meerdere databronnen gelijktijdig verwerkt. De gekozen kaartoriëntatie bepaalt welke referentie leidend is voor de weergave van positie en koers.
De instellingen North Up, COG Up, Course Up en Head Up bepalen hoe de kaart zich gedraagt op het scherm. Het verschil zit in de referentiebron: geografisch noorden, gemeten GPS-beweging (COG), berekende navigatiekoers of gemeten kompasrichting (heading).
Ontstaan en ontwikkeling van kaartoriëntatie
Kaartoriëntatie is ontstaan uit de traditionele papieren zeekaart. Deze werd standaard gedrukt met noord bovenaan en vormde decennialang de basis van nautische navigatie. De kaart was statisch; de navigator bepaalde positie en koers met een kompas en visuele referentiepunten. Dit principe vormt de basis van wat nu North Up wordt genoemd.
Met de introductie van commerciële GPS-systemen begin jaren ’90 (circa 1990–1995) werd realtime positiebepaling mogelijk. De eerste elektronische kaartplotters combineerden GPS-positie met digitale kaarten.
In deze periode was COG (Course Over Ground) technisch al onderdeel van de GPS-datastroom, maar door beperkte rekenkracht en lagere updatefrequenties was COG nog niet stabiel genoeg om als primaire kaartoriëntatie breed toegepast te worden.
Vanaf het begin van de jaren 2000 verbeterde de nauwkeurigheid en snelheid van GPS-ontvangers. Hierdoor kon de bewegingsrichting (COG) stabieler worden berekend. Dit maakte het technisch mogelijk om COG als basis te gebruiken voor een dynamische weergave zoals COG Up.
Rond 2010 volgde een belangrijke ontwikkeling: de integratie van elektronische kompasmodules en inertiële meeteenheden (IMU’s). Hierdoor kon de fysieke oriëntatie van het vaartuig direct worden gemeten, onafhankelijk van beweging over de bodem. Dit maakte een stabiele en nauwkeurige Head Up-weergave mogelijk, vooral bij lage snelheid en stilstand.
In moderne systemen worden meerdere databronnen gelijktijdig verwerkt:
-
GPS-positie
-
COG
-
Heading
-
Route- en waypointdata
-
Sensorinformatie van gekoppelde motoren
De gebruiker kiest welke referentie leidend is voor de kaartrotatie. De overige data blijft actief op de achtergrond.
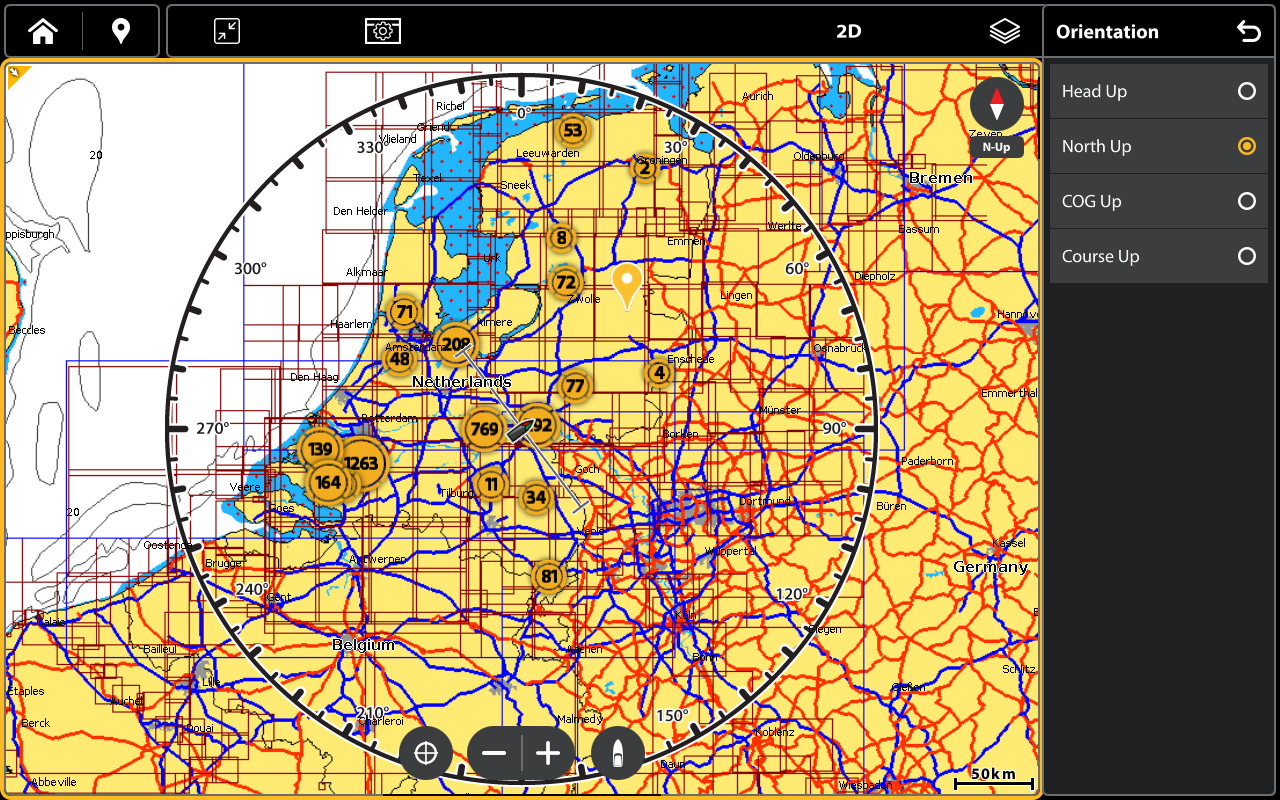
North Up – De kaart blijft geografisch vast
Bij North Up blijft de kaart georiënteerd met noord bovenaan.
De kaart draait niet mee met beweging en gebruikt geen koers- of headingdata voor de oriëntatie. De GPS-positie van het vaartuig wordt wel realtime bijgewerkt.
Wanneer een headingbron beschikbaar is, kan het booticoon afzonderlijk draaien op basis van gemeten oriëntatie. Dit heeft echter geen invloed op de kaartrotatie.
Kort samengevat:
-
De kaart blijft statisch
-
De bootpositie beweegt over de kaart
-
Het icoon kan los daarvan oriëntatie tonen
Deze instelling is geschikt voor overzicht, planning en analyse van kaartinformatie.
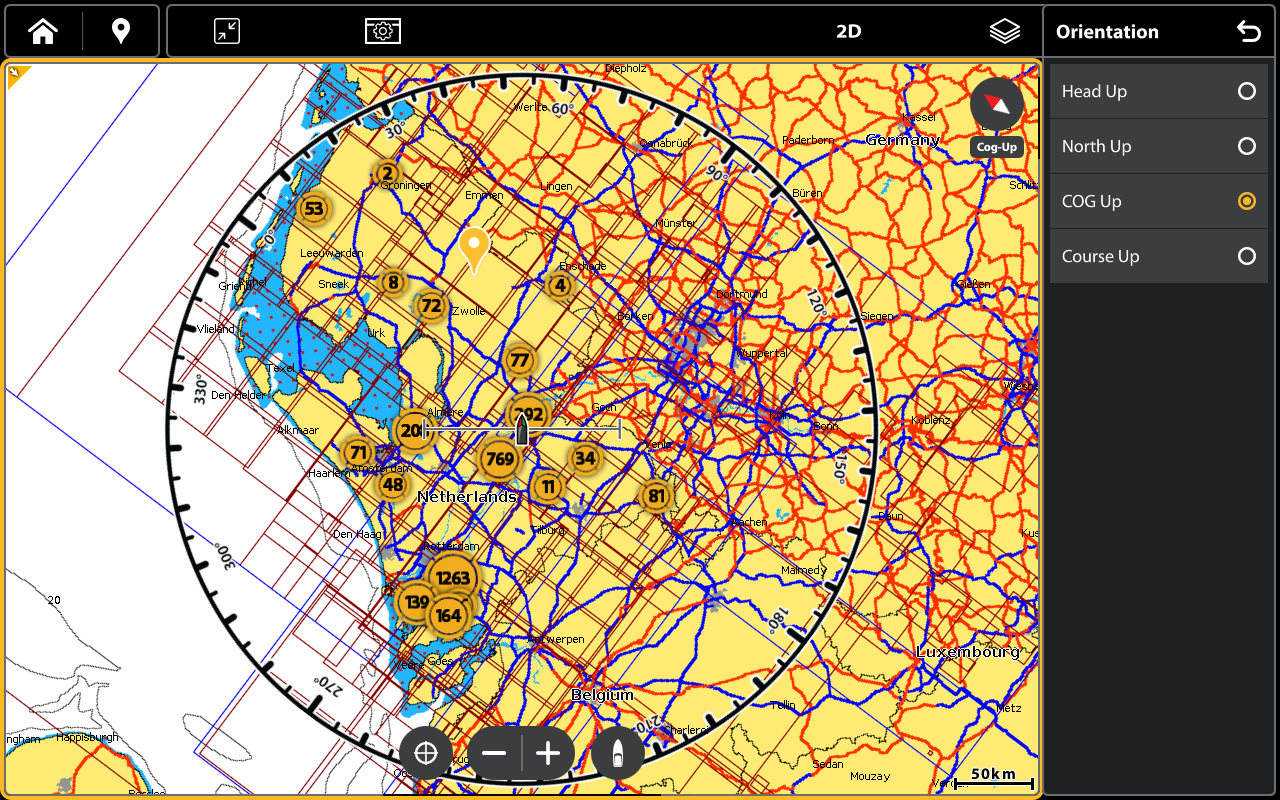
COG Up – De kaart volgt gemeten GPS-beweging
COG (Course Over Ground) beschrijft de werkelijke bewegingsrichting over de bodem.
Het systeem:
-
Meet de huidige GPS-positie
-
Vergelijkt deze met eerdere positiegegevens
-
Berekent een bewegingsvector
-
Gebruikt de berekende richting als kaartreferentie
COG is gebaseerd op daadwerkelijke beweging. Wind, stroming en drift beïnvloeden de berekening direct omdat ze onderdeel zijn van de fysieke verplaatsing.
Visueel blijft het booticoon centraal staan en verschuift de kaart onder het icoon op basis van gemeten beweging.
Bij lage snelheid of gebruik van een trolling motor kunnen kleine GPS-variaties leiden tot subtiele kaartbeweging. Dit komt doordat het systeem continu nieuwe positieverschillen detecteert.
COG Up is geschikt bij:
-
Varen op snelheid
-
Open water navigatie
-
Vrije verplaatsing tussen locaties
Course Up – De kaart volgt een berekende navigatiekoers
Course Up werkt anders dan COG Up.
Wanneer een route of waypoint actief is, berekent het systeem:
-
De huidige positie
-
De doelpositie
-
De bearing (hoek) tussen beide punten
Bearing is de geometrisch berekende hoek tussen jouw positie en een doelpunt en vormt de basis voor routegebaseerde navigatie.
Die berekende koers wordt gebruikt als kaartreferentie.
Belangrijk onderscheid:
-
COG = gemeten bewegingsrichting via GPS
-
Course = berekende koers binnen een actieve navigatiecontext
Wanneer wind of stroming je uit de geplande route duwt, blijft Course Up georiënteerd op de vooraf ingestelde navigatielijn.
Visueel blijft het booticoon centraal en verschuift de kaart onder het icoon op basis van de berekende koers.
Course Up wordt toegepast bij:
-
Route volgen
-
Doelgericht navigeren
-
Structuur- of waypoint-gebaseerd varen

Head Up – De kaart volgt gemeten kompasrichting
Head Up draait de kaart op basis van heading.
Heading is de fysieke oriëntatie van het vaartuig, gemeten via:
-
Een ingebouwde kompasmodule
-
Een externe heading sensor
-
Sensorintegratie via een compatibele trolling motor
Deze meting staat volledig los van GPS-beweging.
De sensor registreert de werkelijke bootrichting en via kalibratie wordt deze vertaald naar graden ten opzichte van noord.
Head Up reageert dus op oriëntatie, niet op beweging over de bodem.
Deze modus biedt stabiliteit bij:
-
Lage snelheid
-
Stilstand
-
Gebruik van Spot-Lock
-
Precisiepositionering
Bij correct gekalibreerde sensoren blijft de kaart stabiel, zelfs wanneer de boot kleine correcties maakt door wind.

Technisch verschil tussen COG, Course en Heading
Deze drie termen beschrijven verschillende meetprincipes:
-
COG meet de daadwerkelijke bewegingsrichting via GPS
-
Course berekent een koers richting een doel binnen navigatie
-
Heading meet de fysieke richting van het vaartuig via een sensor
Kort samengevat:
COG = waar je daadwerkelijk heen beweegt
Course = waar je volgens je navigatie heen moet
Heading = waar je boot fysiek naartoe wijst
Praktische toepassing
North Up is geschikt voor overzicht en analyse omdat de kaart geografisch vast blijft.
Heading is stabiel bij stilstand en langzaam manoeuvreren omdat de oriëntatie gebaseerd is op een sensor.
Course werkt optimaal bij actieve route-navigatie en doelgerichte verplaatsing.
Combinatie met Minn Kota systemen
Bij gebruik van een Minn Kota trolling motor met functies zoals Spot-Lock of automatische koerscorrectie worden positie en oriëntatie continu bijgestuurd.
Deze correcties komen uit:
-
GPS
-
Sensorinformatie
-
Motorfeedback
Daardoor kan Course Up bij actieve positionering kleine aanpassingen tonen omdat het reageert op koerscorrecties.
Head Up blijft doorgaans stabieler wanneer de heading-sensor correct is gekalibreerd.
De samenwerking tussen kaartplotter en motor bepaalt uiteindelijk de stabiliteit van de weergave.
Welke instelling kies je?
North Up – Voor overzicht en analyse
Course Up – Voor route volgen
Head Up – Voor actief vissen en positioneren
COG Up – Voor realtime bewegingsgebaseerde oriëntatie
Veel gebruikers combineren North Up voor overzicht met Head Up tijdens actief vissen voor maximale controle.
Conclusie
North Up, COG Up, Course Up en Head Up zijn verschillende referentiemethoden waarmee een kaartplotter de werkelijkheid vertaalt naar het scherm.
Het verschil zit in de bron van de oriëntatie:
-
Geografisch noorden
-
Gemeten GPS-beweging
-
Berekende navigatiekoers
-
Gemeten kompasrichting
Wanneer je begrijpt welke data jouw systeem gebruikt, kun je bewust kiezen welke instelling het beste past bij jouw vaarstijl en vistechniek.
Wil je meer diepgang of advies over de optimale instellingen voor jouw situatie? Neem gerust contact op via de contactpagina om de instellingen technisch verder af te stemmen.
Veelgestelde vragen (FAQ)
Wat is North Up op een Humminbird kaartplotter?
North Up houdt de kaart vast met het noorden bovenaan, terwijl de boot over de kaart beweegt op basis van GPS.Wat is het verschil tussen COG Up en Course Up?
COG Up is gebaseerd op werkelijke GPS-beweging, terwijl Course Up een berekende koers naar een doel gebruikt.Wat betekent Head Up?
Head Up draait de kaart mee met de fysieke richting van de boot via een kompas of heading sensor.Welke instelling is het beste bij vissen met een Minn Kota motor?
Head Up is vaak het meest intuïtief bij actief positioneren en Spot-Lock gebruik.Waarom is kaartoriëntatie belangrijk?
Omdat het bepaalt hoe snel en intuïtief je je positie, koers en omgeving kunt interpreteren.







